|
mód(ok) modellezése (Werner et al., 2011), amelyre
utaltunk a 3. fejezetben. A folyamatbányászat (lásd ProM-rendszer [van
Dongen et al., 2005]) lehetőséget biztosít arra, hogy folyamati
adatokból (naplófájl) állítsunk elő Petri-háló modelleket (van der
Aalst et al., 2004). Az adatok a naplófájlban speciális formátumban
(MXML-formátum) kell, hogy rendelkezésre álljanak. Egy eseménynapló
tartalmazza eseménysorozatok egy halmazát (trace), amelyek mindegyike
speciális viselkedést ír le, amelyek között hibás eseményvégrehajtás
is lehet. A modellek előállítására számos algoritmus létezik, mint
például az alfa-algoritmus, a genetikus algoritmus vagy a heurisztikus
eljárás stb. (van Dongen et al., 2005).
A valamely algoritmus által létrehozott folyamati
modell ezek után összehasonlítható a referenciamodellel. Kérdés, hogy
az előállított modell (lehet normál vagy hibás működést leíró)
algráfja-e a referenciamodellnek. Ha ez igaz, akkor meg tudjuk
mondani, hogy vajon a rendszer normális feltételek mellett zajlik-e,
vagy izolálni tudjuk a hibát. Ha ez nem igaz, akkor új, lehetséges
hibát fedeztünk fel.
Folyamatinformációk alapján generált
Petri-háló modellek felhasználása
diagnosztikai vizsgálatokhoz
A gyártórendszer működése során fellépő hibák súlyosságukat tekintve
alapvetően háromfélék voltak:
• azonnali leállást eredményező súlyos hiba,
• selejtet eredményező hiba,
• leállást nem eredményező kisebb hiba.
Diagnosztikai vizsgálataink célja, hogy a vizsgált
rendszer működése során szerzett információkból visszaállított hálót
összehasonlítva az előzetes információk alapján felállított helyes és
különböző hibás működéseket leíró hálókkal, következtessünk a
technológiai rendszer működésének helyességére. Ezt a vizsgálatot
kutatásaink során a Petri-hálók terében végeztük el, azaz a tényleges
(esetleg ismert vagy ismeretlen hibát tartalmazó) működést leíró
Petri-hálót összehasonlítjuk a rendszer normál referenciamodelljével,
és a Petri-hálók gráftávolságát meghatározva következtetünk a normál
működéstől való eltérés mértékére, azaz a hiba súlyosságára (Gerzson
et al., 2011). Gráfok távolságának meghatározása legnagyobb közös
részgráfjuk ismeretében az alábbi képlettel történhet (Bunke –
Shearer, 1998):

ahol |G| a G gráf csúcsainak számát, mcs(G1, G2) a G1 és G2 gráfok
maximális közös részgráfját, míg d(G1, G2) a G1 és G2 gráfok
távolságát jelöli. A maximális közös részgráf megkeresése általában
algoritmikusan nehéz feladat, de az általunk összehasonlítani kívánt
Petri-hálók csúcscímkézett gráfoknak tekinthetőek és az alkalmazott
hibamodellezés miatt speciális szerkezetűek, így a gráftávolság
számolása ebben az esetben algoritmikusan lényegesen egyszerűbb
probléma.
Míg a gyártórendszerek különböző modelljeiként a
komplex rendszerek esetén is jól átlátható hierarchikus, színezett
Petri-hálókat célszerű használni, addig a gráfok szerkezeti
analíziséhez, így a gráfösszehasonlításhoz is egyszintű (nem
hierarchikus) és alacsonyszintű (nem színezett) hálókat kell
alkalmazni. A hierarchikus és színezett hálóként felépített
alapmodellt egy általunk fejlesztett Converter szoftver (Márczi et
al., 2011) felhasználásával alakítjuk át ProM (van Dongen et al.,
2005) szoftverrel megjeleníthető alacsonyszintű, egyszintű hálóvá,
ahogy azt a 4. fejezetben már említettük.
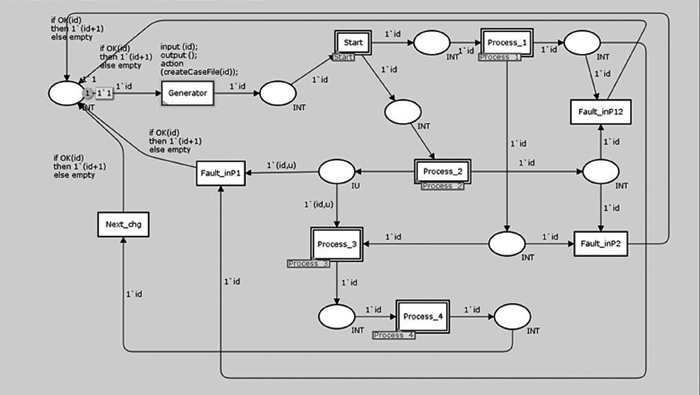
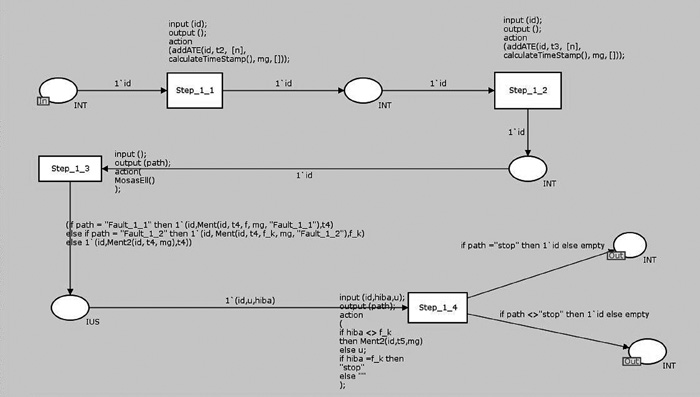
Munkánk jelen szakaszában a technológiai rendszer
működését a CPN-Tools-ban végzett szimulációval vizsgáltuk. A háló
végrehajtása során a program lehetőséget ad a valós rendszerek
működéséhez hasonló naplófájlok generálására. Ezek a naplófájlok
időbélyeggel ellátva tartalmazzák a technológiai rendszerben
vagy az azt szimuláló hálóban bekövetkező
eseményeket, azok végrehajtóit. Ezeknek az adatoknak a segítségével
lehet az adott működésnek megfelelő hálót visszaállítani, majd azt a
normál referenciahálóval összehasonlítva a rendszer
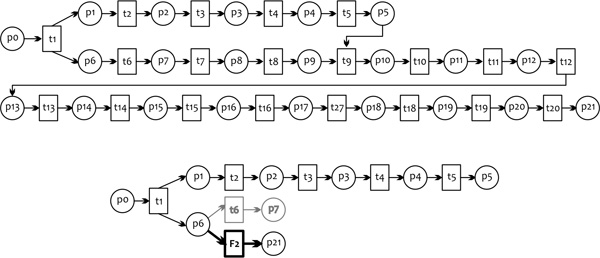
működési állapotát meghatározni. A vizsgált rendszerünk
referenciamodellje és egy tényleges, a folyamat elején leállást okozó
hibás működéshez tartozó modell alacsonyszintű hálója a
3. ábrán látható.
A két gráf távolsága a legnagyobb közös részgráf
alapján meghatározva d1 = 0.69 értéknek adódik. Összehasonlításképpen
az 1. táblázat két további esetben
(leállást nem eredményező kis hiba, illetve leállást nem eredményező
kis hiba, majd a folyamat végén leállást eredményező hiba) is mutatja
a számolt gráftávolságok értékét.
Megállapítható, hogy ha a technológiai folyamatban
csak egy kicsi, kezelhető hiba következik be, akkor a kapott
gráftávolság értéke kicsi. Leállást eredményező hiba esetén annál
közelebb lesz a kapott távolságérték 1-hez, minél korábban következett
be a leállást eredményező hiba.
Konklúzió
Munkánkban összefoglaltuk azokat a lehetőségeket, amelyek
felhasználhatóak lehetnek járműipari diagnosztikai területen. A
folyamatok elemzéséhez egyrészt modelleket – itt a Petri-hálók
kerültek alkalmazásra –, másrészt a folyamatok során rögzített
naplófájlokat használtunk fel. Megmutattuk, hogy a diagnosztikai
elemzésekhez normál referenciamodellt szükséges készíteni, ami
célszerűen hierarchikus felépítésű, másrészt kiterjesztett
referenciamodelleket, amelyek a lehetséges hibákat is megjelenítik.
Vizsgáltuk, hogy diszkrét eseményű rendszerek
struktúra-identifikációjához hogyan használhatók a folyamatbányászat
eszközei. Bemutattunk egy módszert a referenciamodell és a
naplófájlból előállított helyes és hibás működéseket leíró modellek
összehasonlítására. A bemutatott módszereket járműipari területen
vizsgáltuk, és megállapítottuk, hogy ezen speciális területeken is van
létjogosultsága a modellezési, naplófájl-feldolgozási, az
összehasonlítási műveleteknek, ha azokat elsődlegesen
hibadiagnosztikára akarjuk használni.
Ez a munka a Magyar Állam és az Európai Unió pénzügyi támogatásával
valósult meg a TÁMOP-4.2.1/B-09/1/KONV-2010-0003 projekt keretén
belül.
Kulcsszavak: folyamat, modellezés, Petri-háló, hibadiagnosztika,
járműipar
IRODALOM
Blanke, M. – Kinnaert, M. – Lunze, J. –
Staroswiecki, M. (2006): Diagnosis and Fault-tolerant Control.
Springer-Verlag
Bunke, H. – Shearer, K. (1998): A Graph
Distance Metric Based on Maximal Common Subgraph. Pattern Recognition
Letters. 19, 255–259.
Gerzson M. – Leitold A. – Hangos K. M.
(2011): Model Based Process Diagnosis Using Graph Methods. Factory
Automation 2011 Conference, Győr, Hungary, 62–70.
Hangos K. M. – Cameron, I. T. (2001):
Process Modelling and Model Analysis. Academic Press, London
Hangos K. M. – Lakner R. – Gerzson M.
(2001): Intelligent Control Systems: An Introduction with Examples.
Kluwer Academic Publisher, New York
Jensen, K. (1994): Coloured Petri Nets.
Springer-Verlag
Márczi, B. – Gerzson, M. – Leitold, A.
(2011): Diagnostic Investigations Based on the Petri Net Model
Generated from the Process Information. Hungarian Journal of
Industrial Chemistry. 39, 1, 133–139.
Márczi B. – Leitold A. – Gerzson M.
(2012): Diagnosis of Technological Systems Based on Their Colored
Petri Net Model. 7th Vienna Symposium on Mathematical Modelling, Wien,
Austria, ARGESIM Report S38.
Murata, T. (1989): Petri Nets: Properties,
Analysis and Applications. Proceedings of the IEEE. 77, 4, 541–580.
van der Aalst, W. M. P. et al. (2007):
Business Process Mining: An Industrial Application. Information
Systems, 32, 5, 713–732.
van der Aalst, W. M. P. – Weijters, A. J.
M. M. – Maruster, L. (2004): Workflow Mining: Discovering Process
Models from Event Logs. IEEE Transactions on Knowledge and Data
Engineering. 16(9): 1128-1142 2004.
van Dongen, B. F. et al. (2005): The ProM
Framework: A New Era in Process Mining Tool Support. ICATPN. 444–454.
Werner-Stark A. – Gerzson M. – Hangos K.
M. (2011): Discrete Event Model Structure Identification Using Process
Mining. Proceedings of the IASTED International Conference Modelling,
Identification, and Control (MIC 2011), Innsbruck, Austria, 228–233,
ISBN 978-0-88986-863-2
Werner-Stark A. – Dulai T. (2012):
Agent-based Analysis and Detection of Functional Faults of Vehicle
Industry Processes: A Process Mining Approach. 6th International KES
Conference on Agents and Multi-agent Systems, Technologies and
Applications KES-AMSTA 2012, Dubrovnik, Croatia, 25–27. 06. 2012.
|