|
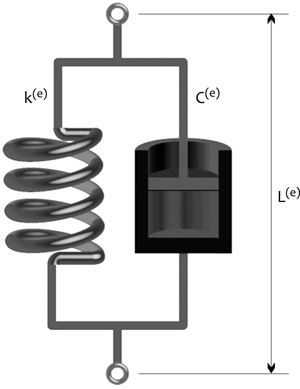
A korábbi gondolatmenetet folytatva, a kerék
szerkezete teljes egészében modellezhető ilyen rugalmas és
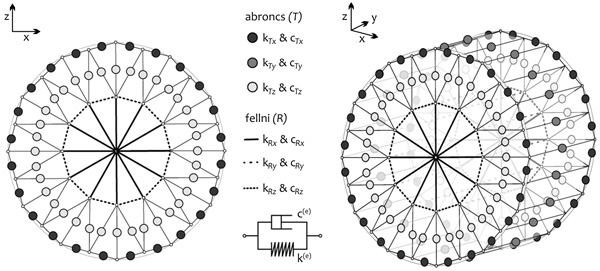
csillapítási tagokkal felruházott elemekkel. Az 5. ábrán a
különböző árnyalatú pöttyök és vonaltípusok különböző rugalmas és
csillapítási tagokat jelölnek. A jelölés megválasztása csupán a
szemléltetést szolgálja. Fontos megjegyezni: a fellni és a gumiabroncs
eltérő szilárdsága is kezelhető ilyen elemekkel úgy, hogy két-három
nagyságrenddel merevebb jellemzőkkel rendelkeznek a felnit alkotó
elemek. A rugalmas és csillapítási tagok segítségével a gumiabroncs és
a fellni anyagának eltérő viselkedése is leírható; például ha a két
anyag rugalmas és csillapító tagjainak arányai eltérnek, más
dinamikájúak lesznek: gyors és minimális deformáció, vagy lassú, de
jelentős alakváltozás. Ha az abroncs kerületi (az 5. ábrán
sötét pöttyök) és sugárirányú (világosabb pöttyök) elemeinek anyaga
azonos, a hosszúságuk eltérősége miatt – akárcsak a különböző
hosszúságú, de azonos anyagú rugóknál, az (1) egyenlet alapján – a
rugalmas és csillapítási tényezőjük különbözni fog (az ábrán más
árnyalattal vagy vonaltípussal jelölve). Emellett egyes
abroncskerületi pontokhoz nem egy, hanem két darab abroncs sugárirányú
elem (későbbiekben: belső elem) csatlakozik (5. ábra). A
duplázott elemek rugalmas és csillapítási tulajdonsága nagy N
szögosztásértékekre megközelítően a fele a szimpla elemek rugalmas és
csillapítási tényezőinek, amivel a kerékmodell számol, de az 5.
ábrán az átláthatóság érdekében ez nincs külön megjelölve.
A kerékmodellt alkotó szerkezeti elemek nem
rendelkeznek önsúllyal, mert a kerületi elemek dinamikai
tulajdonságának megőrzése érdekében, ahogy a rugalmas tag is
fordítottan arányosan nő a hossz csökkenésével, úgy a tömeg is ezt
tenné. A rúdelemek önsúlyának elhanyagolásából származó számolási hiba
elhanyagolhatóan kicsi – a kerék és a jármű tömege közti
nagyságrendbeli eltérés miatt –, azonban magasabb haladási
sebességeken valószínű, hogy a fellni tömegének, tömegeloszlásának
szerepe jelentőssé fog válni. Ebben az esetben a korábban említett
módon a tömeg nélküli csomópontokhoz – őket átalakítva
tömegközéppontokká – tömeg rendelhető.
Megvalósítás
A kerékmodell tárolja az elemek és csomópontok kapcsolódási
viszonyait, a kerék kezdeti geometriáját (5. ábra), illetve az
aktuális megtámasztásokat (kényszereket), azaz hogy mely csomópontok
érintik a talajt, és e pontoknál milyen deformációk jöttek létre a
talaj anyagában. Ezek alapján minden időpillanatban számolja a
kerékmodell a csomópontok gyorsulásait, sebességeit és elmozdulásait,
majd ezekből az elemekben ébredő belső erőket, valamint a talaj és
gumiabroncsrészek között létrejövő érintő- és merőleges irányú erőket.
A számítási algoritmus maga a kerékmodell lelke,
lényegében az elmozdulás módszer van átszabva és kibővítve az aktuális
mechanikai problémára. A kerékmodell minden egyes csomópontra
egyensúlyi egyenleteket ír fel, amelyeket „összegezve” megkapja a
teljes szerkezet differenciál-egyenletrendszerét. Ehhez szükség van a
rúdelemek lokális koordinátarendszeréből (minden rúdelemnél egyéni, és
időben változó) való áttérésre a kerékmodell globális
koordinátarendszerébe (az 5. ábra és a 6. ábra
koordinátarendszere). Az elemek lokális koordinátarendszerében a
megnyúlás egy dimenzióban történik, mindig a rúd hatásvonalán. E
hatásvonal Θ állásszöge azonban változhat, így célszerű a rúdelemet
közrefogó csomópontok elmozdulását tekinteni, és ezeket függőleges és
vízszintes irányú komponensekre bontani. Így bármely rúd megnyúlása
felírható a közrefogó csomópont négy elmozduláskomponensével. Az (5)
egyenletben a két tetszőleges i és j csomópontok által közrefogott
elem megnyúlása látható:

ahol cΘ a koszinusza, sΘ pedig a szinusza a Θ állásszöggel rendelkező
rúdelemnek (6. ábra). Az (5) egyenletet deriválva a megnyúlás
sebessége is megkapható, majd ezeket a (4) egyenletbe beírva, és a
szögfüggvényeket az elem anyagi tulajdonságaival együtt két mátrixba
foglalva:

Az összes elemre felírható ezen egyenletrendszer, majd ezeket
csomópontonként összegezve a csomóponti egyensúlyi egyenletrendszerek
is, melyeket egységes formába rendezve a teljes rendszer
egyenletrendszere is megalkotható.
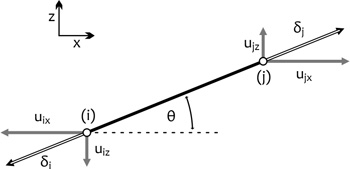
6. ábra • Az i és j tetszőleges csomópontok
által közrefogott rúdelem
Erre egy egyszerű példa (a 7. ábra bal oldali részlete), ha egy
rugót felfüggesztve, majd F erővel terhelve a rugóban csupán
rugóirányú erők ébredhetnek, így a rugó szimmetriatengelye egybe fog
esni a terhelő erővel. Ekkor nem szükséges a lokális-globális
koordinátarendszerek használata, elég, ha az erő hatásvonalának
egyenese van csupán figyelembe véve, és az ébredő belső erő nagysága
megegyező a terhelő erővel.
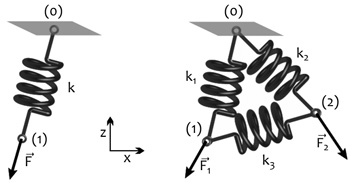
7. ábra • Egyetlen rugó és háromszögbe
kapcsolt rugók terhelése
Ha azonban három rugót a végeiknél összekapcsolunk (a 7. ábra
jobb oldali részlete), e kapcsolódási pontokból egyet felfüggesztve és
így terhelve a másik két kapcsolódási pontot, már nem lehetséges a
problémát az előző esetben tapasztalt evidens módon megoldani, csak
részekre bontással, csomóponti egyensúlyi egyenletekkel. Eszerint
minden – a példában a (0), (1) és (2) – csomópontra fel kell írni a
vektoriális erőegyensúlyt, ahol a belső erők tovább bonthatók a (2)
egyenlet szerint. Ezután (síkbeli esetet feltételezve) minden erő
felbontható függőleges, z-irányú és vízszintes, x-irányú komponensekre
– a (6) egyenlet szerint, csak a csillapítós tagot elhagyva –, így
minden csomópont esetén két egyensúlyi egyenlet lesz, a két
komponensnek megfelelően. Az összes csomópont mindkét irányú
komponensét tartalmazza az f külső erők, és az u csomóponti
elmozdulások vektora a (7) egyenlet szerint.

A 7. ábra jobb oldali példáját tekintve a vektorok hossza 6, a
K mátrix mérete pedig 6×6, amely nem csak az elemek rugalmas
tényezőjét, hanem az elemek helyzetét is magába foglalja. Tehát
globálisan szemlélve a problémát, nemcsak az elemek merevségétől
(rugós tag), azaz az anyagi jellemzőiktől függ, hanem a helyzetüktől,
a globális koordinátarendszerben vett állásszögeiktől is.
A folyamatot nem részletezve, a kerékmodell
elemeire nézve, kiegészítve a (6) egyenletet a csomópontokban
elhelyezkedő tömegekkel, a csomóponti erők szerint az alábbi mátrixos
formába rendezhető a teljes rendszer egyensúlyi egyenletrendszere:

ahol f, u és deriváltjainak vektorai már a rendszer összes
csomópontjának függőleges és vízszintes komponenseit magukba
foglalják. Tehát a (7) és (8) egyenletekben már nincs (e) felsőindex,
hiszen ezek nem egy-egy elemre, hanem a teljes szerkezetre
vonatkoznak. Természetesen, ha egyedül a kerék középpontjába helyezett
terhelés (mint tömeg) van figyelembe véve, akkor az M tömegmátrix
csupán két elemet tartalmaz (x és z irányú komponense a
kerékközépponthoz kapcsolódóan).
Egy másik példában két rugót párhuzamosan
felfüggesztve, végpontjaikat egy elemmel összekötve, és így erővel
terhelve a rugók azonos megnyúlást szenvednek. E két rugót
függőlegesen szimmetrikusan, a kapcsolódási pontnál hegyesszöget
bezárva és így felfüggesztve, valamint az előző esetnél használt
erővel terhelve, az előző esethez képest a megnyúlás eltérő, nagyobb
lesz, mert a két elemben így nagyobb belső erő ébred. A modell
finomságát kifejező, részben szabadon állítható paraméter (csupán
4-nél nagyobb páros szám) a szögosztás, amely a fellni belső elemeinek
számát jelenti. Ezt N-nel jelölve a modell
3N + 1
(9)
csomópontot, és
7N
(10)
darab elemet tartalmaz. Természetesen az N érték növelésével egy
iteráció futási ideje fokozatosan növekszik, ami néhány szögosztásnál
az 1. táblázatban olvasható.
N szögosztás
(db) |
egy iteráció futási ideje (ms) |
| 4 |
5,1 |
| 10 |
13 |
| 20 |
20,7 |
| 50 |
56 |
| 100 |
135 |
| 200 |
460 |
1. táblázat
A kerékmodell a Matlab-forráskód (M-code) felületén került
implementálásra, mely a C programozási nyelvhez hasonló programnyelvet
használ. A Matlab használatának fő oka a vektor- és mátrixműveletek
széles körű és gyors kezelése. A kerékmodell forráskódja számos olyan
programozástechnikai megoldást tartalmaz, amellyel a futási idő még
tovább csökkenthető. Ilyen például az egyes rúdelemek lokális
koordinátarendszeréből a teljes modell globális koordinátarendszerébe
történő váltás során használatos – az (5) egyenletben látható –
szögfüggvények kiküszöbölése. Ugyanis elméletben ismertnek kell lennie
minden egyes rúdelem szögének, majd ezek megfelelő szögfüggvényeinek
kombinációjából egy „átkonvertáló” mátrixot kell képezni minden
rúdelemre (e mátrix már összevonva látható az anyagi jellemzőkkel a
(6), (7), és (8) egyenletekben). Itt a köztes lépések helyett a
kerékmodell egy egyszerűbb és gyorsabb módszert alkalmaz.
Az idő szerepe kiemelten fontos a diszkrét idejű
kerékmodell-számításában. A numerikus számítások elvégzéséhez
szükséges megfelelő futási idő és pontosság biztosításához az
algoritmus változó lépésközzel dolgozik. A talajérintési pontok minél
pontosabb meghatározását a mintavételezési idő növelésével, míg a
megfelelő futásidőt az állandósult állapot körüli mintavételezési idő
csökkentésével biztosítja.
A modell tehát megszámlálhatóan sok elemre bontja a
kereket; a kerékmodell ezen elemek alakváltozásait képes számolni,
majd ezeket összegezve képes meghatározni a kerék alakját és az ébredő
erőket a kerék anyagán belül, valamint a talaj és kerék érintkezési
felületén.
Pontok talajérintése
A kényszerek vagy más néven megtámasztások a kerékmodell egyik
leglényegesebb pontját képezik. A kezdeti időpillanat egy idealizált
eset, amikor is a deformálódástól mentes kerék egyetlen pontban érinti
a talajt – hiszen a kerék önsúlya zérusnak van véve –, ilyen formában
látható a modell az 5. ábrán. A modell jelen állapotában a
forgómozgást végző kereket még nem képes megfelelően leírni, így az
álló helyzetben terhelt kerék alakváltozásának bemutatására kerül a fő
hangsúly. A külső és belső erőktől mentes kerékmodellnél a jármű
súlyának megközelítően a negyedét a keréktengelyre helyezve egy csak
függőleges irányú erőkomponens terheli a modellt, megindul az
alakváltozás. E folyamat a függőleges tengelyre ideális esetben
szimmetrikus, és az első érintkezési ponttól a kerületen két irányban
haladva az abroncs kerületi pontjai párosával érkeznek le a talajra. A
deformálódás során a kerületi pontok lefelé és a z tengelytől
távolodva haladnak. A leérkezés pillanatában a kerületi pontok
„hozzáragadnak” a talajhoz, új függőleges (a talaj anyagának
összenyomása) és vízszintes (csúszás-tapadás) kényszerek jelennek meg.
A kerékmodell a talaj anyagát is a kerék anyagához hasonlóan
paraméterezi, ezek a talaj szilárdságát reprezentálják. Az értékeket a
felni anyagát megközelítő nagyságrendűre választva, a talaj
deformációja µm nagyságrendbe esik. Ennél lágyabb anyagú talaj esetén
a talajrészek deformációja egyre látványosabb, akár összemérhetővé is
tehető az abroncsnál tapasztaltakkal (például homok vagy hó esetén). A
kerékmodell tehát képes a talaj anyagában létrejövő alakváltozásokat
is kezelni.
Álló kerék alakváltozása
A kerék középpontját terhelő nehézségi erő hatására a kerékmodellt
alkotó elemekben belső erők ébrednek, a helyzetük, a hozzájuk tartozó
anyagi jellemzők és a külső erő(k) függvényében.
Forgómozgást nem végző kerék esetén az alakváltozás
a függőleges tengelyre szimmetrikus alakot eredményez.
|
ςKT |
ςCT |
ςKR |
ςCR |
|
103 |
102 |
106 |
102 |
2. táblázat • A példában használt paraméterek2
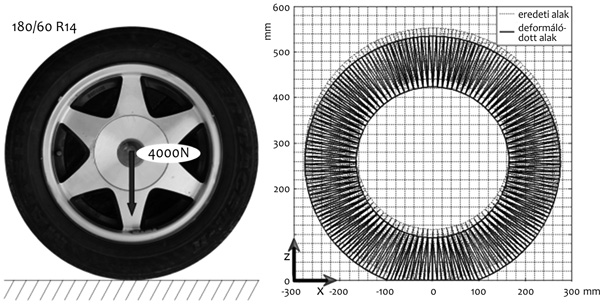
A 8. ábrán jobb oldalon egy 180/60R14-es
kerék síkbeli modell szerinti képe látható (a kerék nyugalmi sugara:
276,1 mm, a felnié pedig 165,1 mm), a kiindulási és a deformálódott
alakjával. A példában használt szögosztás: N = 100. Az origó a
deformálódástól mentes kerék talajérintési pontja.
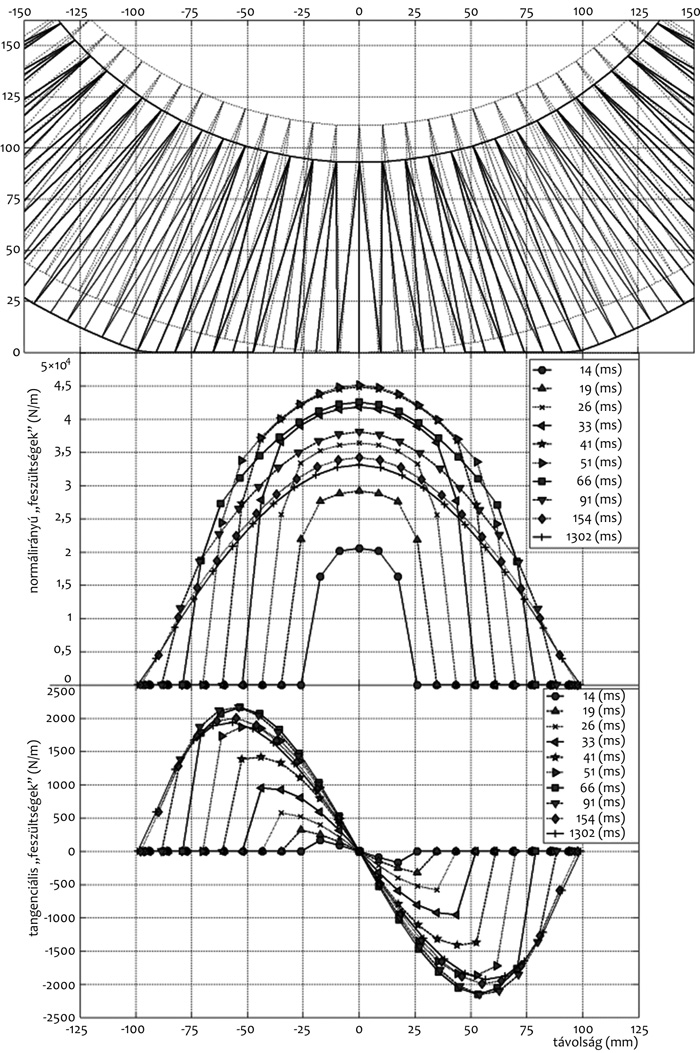
A 9. ábrán legfelül a
talajjal való érintkezési szakaszra közelítve látható a deformálódott
alak. Térbeli kerékmodell esetén minden talajt érintő ponthoz
rendelhető egy kis felületrész, amelyen a pontot terhelő erő
megoszlik, amelyet a két anyag határán ébredő feszültségnek nevezünk.
Síkbeli modell esetén a keréknek nincs vastagsága, ezáltal csupán kis
szakaszok rendelhetők a pontokhoz, így mennyiségileg nem feszültséget
ad a modell, hanem vonal mentén megoszló terhelést (N/m), ezért van a
9. ábrán idézőjelben az elnevezés, illetve továbbiakban
feszültségként van említve a mennyiség. A 9. ábrán középen
távolsághelyesen a felületre merőleges, és alul a felületre nézve
érintő irányú „feszültségek” időbeli alakulása látható, amelyek a
kerékre visszahatnak.
A negatív tartományban lévő feszültségek a
koordinátatengellyel ellentétes irányba mutatnak, így a tangenciális
feszültségek az origó felé irányulnak, a kerék csomópontjai a talajon
az origótól távolodni „próbálnak”. A teljes talajérintési hosszra
integrálva a normálirányú feszültségeket, megkapható a talajon ébredő
erők eredője, melynek hatásvonala a szimmetria miatt az origón áthalad
(a kerék középpontjára nem fejt ki forgatónyomatékot), nagysága pedig
állandósult helyzetben a nehézségi erővel egyezik meg. A tangenciális
feszültségek függvénye szintén szimmetrikus, így a talajon ébredő
oldalirányú erők eredője zérus, a kerék álló helyzetben
marad. A kilenc különböző időpontban felvett – a kerékmodell a
köztes időpontokban is számolta a feszültségeket – görbéből látható,
hogy a vizsgált 1,3 másodperces időintervallum első tizedében (154 ms)
zajlik le a változás zöme; a két utolsó időpontbeli görbe csupán abban
tér el, hogy a talajt érintő pontok enyhén kifelé csúsztak.
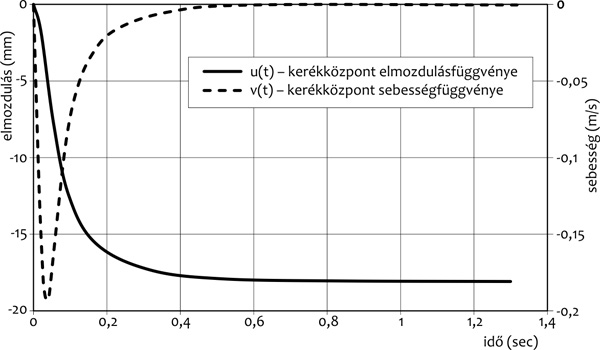
A 10. ábrán látható
a kerék középpontjának elmozdulás–idő és sebesség–idő függvénye,
melyekről felismerhető, hogy a megadott paraméterekkel ebben a
példában egy túlcsillapított másodfokú rendszert ad a kerékmodell. A
kerék középpontjába helyezett tömeg miatt a rendszernek van
tehetetlensége, így a talajérintési ponton a normálfeszültségek ~51
ms-ig (pontvonal és jobbra mutató háromszög), a tangenciális
feszültségek ~91 ms-ig (szaggatott vonal és lefelé mutató háromszög)
fokozatosan növekednek, majd „szétterülve” csökkennek. Az utóbbi három
ábrát összevetve látható, hogy a kerék 1,8 cm-t mozdult el a ~400
kg-os terhelés (4000N) hatására, és így a talajérintési szakasz
nagysága 20 cm.
A deformációk lezajlásával kapott állandósult
állapotra vonatkozó feszültséggörbék jó egyezést mutatnak más síkbeli
kerékmodelleknél kapott görbékkel.
Fejlesztési irányok
A következő sarkalatos lépés nyilvánvalóan a kerék megforgatása lesz.
Ehhez elkerülhetetlen a pontos meghatározása azoknak az időpontoknak,
amikor a talajt érintő pontok elengedik a megtámasztásukat. E
számítást már tartalmazza a modell, azonban a talajon való csúszás – a
korábban említett adhéziós és deformációs állapotok – folyamatának
pontosítása még hátra van.
A kerék megforgatása nem hajtott kerék esetén egy
vízszintes erőkomponens segítségével történhet, vagy hajtott kerék
esetén a motor által leadott és a keréktengelyre átszármaztatott
nyomatékkal ekvivalens erőpárok segítségével. Az előbbi egyetlen erőt
a keréktengelyre, míg az utóbbi esetben az erőpárokat a fellni
kerületi pontjaira érdemes helyezni, hiszen ennek anyaga minimális
alakváltozást szenvedhet csak.
A már forgásban lévő keréknél a modell képes lesz a
talajon eredő erőket, a 9. ábrához hasonlóan a feszültségeket
és eredő gördülési ellenállást számolni, illetve közelítést adni arra,
hogy a kerék milyen fokú csúszási állapotban van, mellyel később a
jármű mozgásállapotának szabályozásához is hozzá tud majd járulni.
Kulcsszavak: járműdinamika, egynyomvonalú,
ún. biciklimodell, kerék, gumiabroncs,
menetdinamika, rugalmas és csillapító tag, végeselem-módszer
IRODALOM
Lacombe, J. (2000): Tire Model for
Simulations of Vehicle Motion on High and Low Friction Road Surfaces.
In: Proceedings of the 2000 Winter Simulation Conference. Hanover, NH,
USA.
Lundquist, C. – Schön, T. B. (2009):
Recursive Identication of Cornering Stiffness Parameters for an
Enhanced Single Track Model. Saint-Malo, France
Pálfi L. (2010): A súrlódás hiszterézis
komponensének végeselemes modellezése gumi-érdes felület csúszó pár
esetén (Phd-értekezés). Budapest
Powers, W. F. – Nicastri, P. R. (2000):
Automotive Vehicle Control Challenges in the 21st Century. Elsevier
Ramajani, R. (2006): Vehicle Dynamics and
Control. University of Minnesota, USA–Springer ISBN 0-387-26396-9,
e-ISBN 0-387-28823-6.
Ray, L. R. (1997): Nonlinear Tire Force
Estimation and Road Friction Identification: Simulation and
Experiments. Automatica. 33,
Roylance, D. (2000): Trusses.
Massachusetts Institute of Technology, Cambridge, MA Vable, Madhukar
(2002): Mechanics of Materials. : Oxford University Press (Michigan
Technological University), NY
Yung-Hsiand, J. H. – Gerdes, C. J. A
(2006): Feel for the Road : A Method to Estimate Tire Parameters Using
Steering Torque. AVEC ‘06, Stanford, California, USA
Zomotor Á. (2006): Gépjármű
menetdinamika.: Maróti, Bp
LÁBJEGYZETEK
1 Ezáltal rúdelemekben
csak húzó-, illetve nyomóerők ébredhetnek a szerkezeten belül, azaz
nincs nyíró, csavaró és hajlító igénybevétel, valamint a kerékmodell
eltekint a kihajlás jelenségétől.
<
2 Sűrűségek, amelyek N-től
függetlenek, és amelyekből a k és c paraméterek származtathatók.
Jelentése: a keréknél egy fok mekkora merevséget, csillapítást
képvisel.
<
|