|
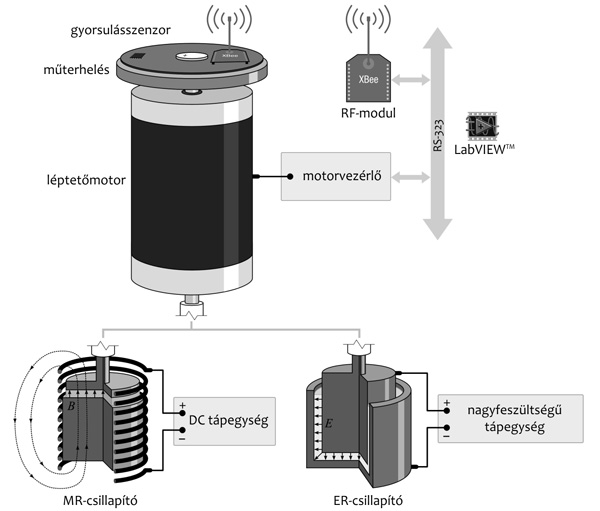
A léptetőmotor vezérlését és meghajtását az L297 és
L298 típusú integrált áramkörpárossal valósítottuk meg. A motorvezérlő
elektronika és az asztali számítógép között RS-232 szabvány szerint
zajlik a kommunikáció. Az asztali számítógépen futó, vezérlést és
adatfeldolgozást végző szoftvert LabVIEW grafikus fejlesztői
környezetben programoztuk. A forgó egységen lévő RF-modullal
kommunikáló XBee modul szintén RS-232 szabvány szerint kapcsolódik az
asztali számítógéphez.
A léptetőmotor tengelyéhez rögzített műterhelés és
a nyomtatott áramköri lemezen kialakított mérő- és kommunikációs
egység fényképét a 3. ábrán mutatjuk be. Az alkatrészek
aszimmetrikus elhelyezkedéséből eredő, tengelyre ható deviációs
nyomaték elhanyagolható. A gyorsulásérzékelőt a mérés érzékenységének
növelése érdekében a forgástengelytől távol helyeztük el.
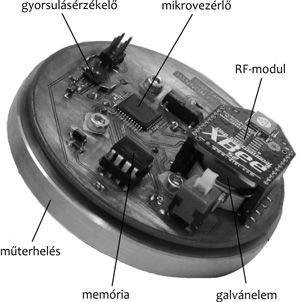
3. ábra • A műterhelés a hozzá rögzített
mérő-
és kommunikációs egységgel.
Az 1. ábrán az általunk épített MR- és
ER-csillapítóegységek sematikus rajzát is bemutatjuk. Ezek az egységek
egy merev tengelykapcsoló segítségével csatlakoztathatók a
léptetőmotor átmenő tengelyének másik végéhez. Az MR-csillapítót egy 4
cm belső átmérőjű N = 1500 menetű szolenoid belsejében alakítottuk ki.
A motor tengelyéhez lágyvas tárcsa csatlakozik, amely egy ugyancsak
lágyvas hengerrel szemben tud rotációs mozgást végezni. (Ez utóbbi, a
készülék állórészéhez rögzített henger fluxusvezető szerepet is
játszik.) A tárcsa és a henger közti 2 mm-es résben helyezkedik el az
MR-fluidum. A mágneses indukciót ebben a résben mértük egy
Hall-érzékelő segítségével. Az MR-folyadéknak a résből való kifolyását
egy műanyag hengerpalást akadályozza meg. A szolenoidot egy nagyáramú
tápegységről (I = 1-3 A) hajtottuk meg. Az ER-csillapítót egy a
léptetőmotor tengelyéhez kapcsolódó 4 cm magas és 3,8 cm átmérőjű
alumínium hengerből és egy alumínium serlegből alakítottuk ki. A
henger és a serleg felületei között 1 mm rést biztosítottunk. Ebbe a
résbe töltöttük az általunk előállított ER-folyadékot. A serleget a
nagyfeszültségű tápegység (Stanford Research PS350) föld potenciálú
negatív pólusára, míg a hengert a pozitív polaritású pólusra
kapcsoltuk. (Ebben az esetben a tengelykapcsolót szigetelő anyagból
készítettük.)
Kiegészítő mérőberendezések és mérések
ER- és MR-folyadékok vizsgálatára
Az általunk használt MR- és ER-fluidumok viszkozitásának mágneses és
elektromos térerősség függését egy Physica MCR 301 típusú Anton Paar
reométerrel határoztuk meg. Az alapkészülékhez egy MRD70/1T típusú
MR-feltétet és egy P-PTD200/E típusú ER-feltétet használtunk. A
mágneses indukciót egy Magnet-Physik gyártmányú teslaméterrel (FH 54)
mértük. A méréseket 20 °C hőmérsékleten végeztük. Az MR-csillapításhoz
a Lord cég magnetit alapú MRF-122EG típusú
magnetoreológiai folyadékját használtuk. Az ER-csillapítási mérésekhez
laboratóriumunkban összeállított különböző koncentrációjú, η = 0,97
Pas dinamikai viszkozitású szilikonolaj és bárium-titanát (BaTiO3)
alapú elektroreológiai folyadékokat használtunk. A
BaTiO3-szemcsék átmérője 50 nm körüli.
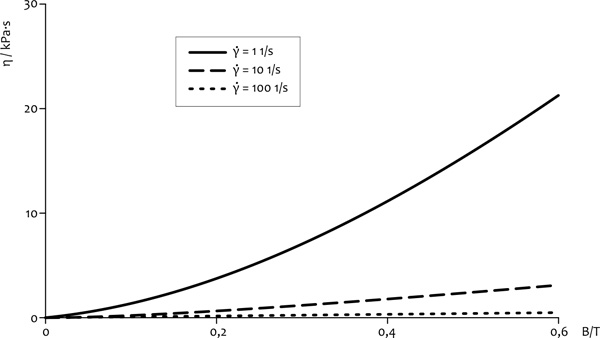
A 4. ábrán az
MRF-122EG magnetoreológiai fluidum viszkozitásának mágneses indukció
függését mutatjuk be különböző nyírási sebességeknél. Látható, hogy a
legkisebb nyírási sebességnél az MRF-122EG szuszpenzió viszkozitása
három nagyságrendet is változik az alkalmazott mágneses indukció
tartományban. A nyírási sebesség növekedésével a viszkozitás értéke
csökken.
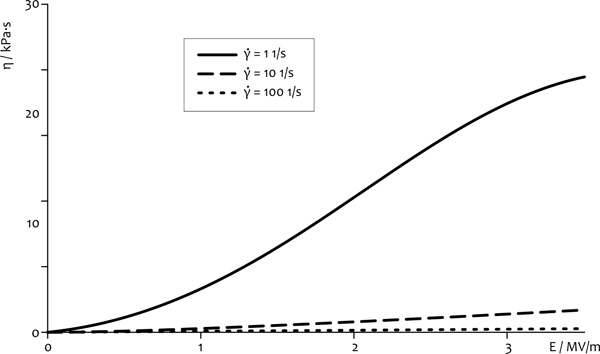
Az 5. ábrán a 40 m/m
%-os szilikonolaj és bárium-titanát ER-fluidum viszkozitásának
elektromos térerősség függése látható különböző nyírási sebességek
mellett. Az 5. ábrát a 4. ábrával összehasonlítva jól
látható, hogy az ER-szuszpenzió viszkozitásnövekedése kisebb mértékű,
mint az MR-fluidumnál tapasztalt. A nyírási sebesség növekedésével a
viszkozitás vs elektromos térerősség görbék ellaposodnak, alig
változnak. A továbbiakban az általunk használt ER- és MR-szuszpenziók
lengéscsillapító hatását részletezzük.
Mérési eredmények és értékelésük
Mérési eredményeinket a csillapítási idő változása
alapján értékeljük. A csillapítási idő az az időintervallum, amelynek
elteltével a gyorsulás mint az idő függvénye a maximális gyorsulás
±5%-ával adott gyorsulási intervallumon belül marad. (A csillapítási
időt általában a kitérések alapján definiálják, esetünkben a
definíciót a közvetlenül mért gyorsulásra terjesztjük ki.)
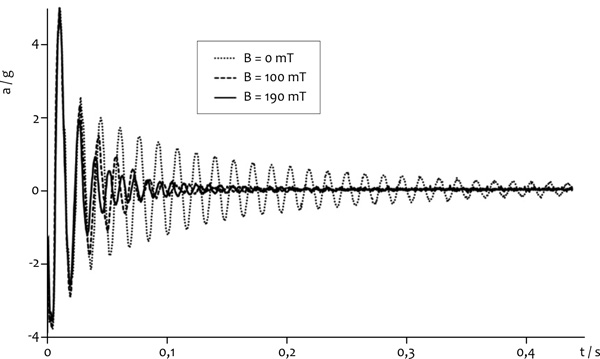
Az általunk épített mérőberendezést először
MR-fluidumok lengést csillapító hatásának mérésével teszteltük. A
6. ábrán az MRF-122EG fluidum csillapító
hatását mutatjuk be. Az ábra az idő függvényében mért tangenciális
gyorsulást szemlélteti, amelyet nehézségi gyorsulás egységekben
tüntettünk fel.
Látható, hogy a mágneses indukció
növelésével a csillapítási idő csökken. Míg MR-csillapítás nélkül a
csillapodó rezgőmozgás gyorsulási amplitúdója még 0,4 s után sem esik
az előírt sávba, addig az MR-csillapítás bekapcsolásával a
csillapítási idő 0,25 s-nak adódik. Kvalitatív módon megállapítható az
is, hogy a csillapítás mértéke nemlineáris függvénye a mágneses
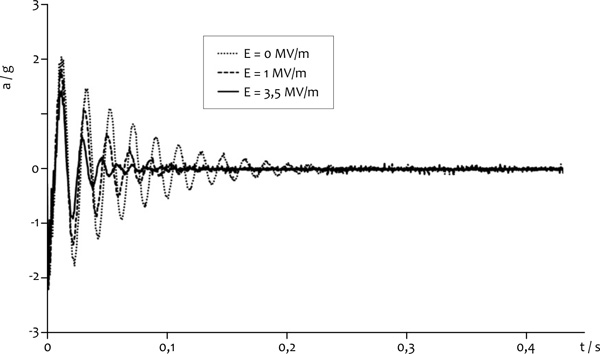
indukciónak. Az ER-csillapítás hatását a 7. ábra
szemlélteti.
A 7. ábrán látható,
hogy már az E = 0 elektromos térerősséghez tartozó csillapítási idő
jóval kisebb mint a 6. ábrán a B = 0 mágneses indukcióhoz
tartozó csillapítási idő. Ez az MR- és az ER-csillapítók
geometriai kialakításával és az alapfluidumok eltérő
viszkozitásával magyarázható. (Az ER-csillapító esetén sokkal nagyobb
az effektív felület, amelynek mentén a csillapító feszültség kifejti
hatását.) Megállapítható: míg E = 0 elektromos térerősség esetén a
rotor kb. 0,3 s csillapítási idő elteltével éri el az egyensúlyi
állapotot, addig E = 3,5 MV/m elektromos térerősség esetén ez már 0,15
s alatt megtörténik. Az ábrán jól látható, hogy a csillapítási idő
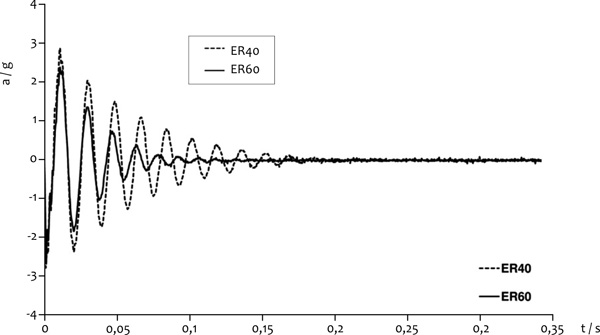
csökken az elektromos térerősség növelésével. A
8. ábrán a csillapítás ER-fluidum koncentrációfüggését
mutatjuk be. A töményebb ER-szuszpenzió csillapítási ideje kb. 2/3
része a hígabb ER-szuszpenzió csillapítási idejének.
Összefoglalás
1. Gyorsulásmérésen alapuló kísérleti berendezést állítottunk össze
léptetőmotor-forgórész ER- és MR-fluidumok által csillapított
lengéseinek meghatá-rozására. A rotációs mozgást végző forgórészen
mért gyorsulásadatokat RF-kommunikáció révén juttattuk el a megfelelő
asztali egységhez.
2. Az általunk épített kísérleti berendezéssel ER-
és MR-csillapítás mellett megmértük egy léptetőmotor egyszeri
léptetése utáni lengés gyorsulásgörbéit.
3. Mérési eredményeinket a csillapítási idő
változása alapján értelmeztük.
4. A vizsgált rendszer fizikai modellezésével, a
modellparaméterek identifikálásával egy következő publikációnkban
foglalkozunk.
A kutatási téma a Magyar Állam és az Európai Unió anyagi támogatásával
a TÁMOP-4.2.1/B-09/1/KONV-2010-0003 projekt keretén belül valósult
meg.
Kulcsszavak: mechatronika, léptetőmotorok, elektroreológiai
folyadékok, magnetoreológiai folyadékok
IRODALOM
Bossis, G. (2001): Electrorheological
Fluids and Magnetorheological Suspensions. Proceedings of the Eighth
International Conference, World Scientific, London
Greiner, W. (1991): Klassische Elektrodynamik. Verlag Harri Deutsch,
Frankfurt am Main
Nava, R. – Ponce, M. A. – Rejón, Z. et al.
(1997): Response Time and Viscosity of Electrorheological Fluids.
Smart Materials and Structures. 6, 67–75.
Odenbach, S. (2002): Magnetoviscous
Effects in Ferrofluids. Springer, Berlin
Odenbach, S. (2009): Colloidal Magnetic
Fluids; Basics, Development and Application of Ferrofluids. (Lecture
Notes in Physics 763), Springer, Berlin
Ohno, K. – Shimoda, M. – Sawada, T.
(2008): Optimal Design of a Tuned Liquid Damper Using a Magnetic Fluid
With An Electromagnet. Journal of Physics D: Condensed Matter. 20,
204146, 1–5.
Roca, A. G. – Costo, R. – Rebolledo, A. F.
et al. (2009): Progress in the Preparation of Magnetic Nanoparticles
for Applications in Biomedicine. Journal of Physics D: Applied
Physics. 42, 1–11.
Rosensweig, R. E. (1985):
Ferrohydrodynamics. Cambridge University Press, Cambridge
de Vincente, J. – Klingenberg, D. J. –
Hidalgo et al. (2011): Magnetorheological Fluids: A Review. Soft
Matter. 7, 3701–3709.
|